Mit einem Bodenfeuchtigkeitssensor kann man – eine gewisse Erfahrung vorausgesetzt – möglicherweise besser den Wasserbedarf eines Hochbeets feststellen und regulieren, als nur „nach Gefühl“ zu gießen.
Die meisten „besseren“ Sensoren dieser Art sind kapazitive Sensoren. Mit diesen Sensoren wird mehr oder weniger die Permittivität der Umgebung gemessen, die vom Wassergehalt abhängt. Weil bei diesem Messprinzip die Elektroden mit der Umgebung nicht in leitenden Kontakt kommen müssen, sind Elektrolyseeffekte, wie sie bei der Leitfähigkeitsmessung mit blanken Metallelektroden vorkommen können, besser vermeidbar.
Da ich mir einen solchen Sensor selber bauen wollte und den auch später mit einer Batterie betreiben und evtl. drahtlos auslesen möchte, habe ich mir zuerst mal den Sensor-Teil vorgenommen: Der Einfachheit halber habe ich die ungefähre Geometrie von kommerziellen Sensoren nachgeahmt. Als Platinenmaterial habe ich FR4 mit nur 0.8 mm Dicke (statt des Standardwerts 1.5) genommen, damit der FR4-Anteil am Dielektrikum schön klein bleibt und die Kapazitätsänderung durch das Wasser groß wird.
Das Layout kann man als KiCAD-Projekt hier finden:
https://github.com/papamidas/MSense_Coupon
Der Sensor schaut im fertigen Zustand so aus:

Die Kapazität des Sensors und seinen Parallelwiderstand habe ich mit einer S11-Messung mit meinem VNWA3-Netzwerkanalysator bestimmt.
Das erste Diagramm zeigt den Vergleich zwischen trockenem Zustand und eingetauchtem Zustand in (Münchener) Leitungswasser bei 22 °C im Frequenzbereich zwischen 10 kHz und 100 MHz:
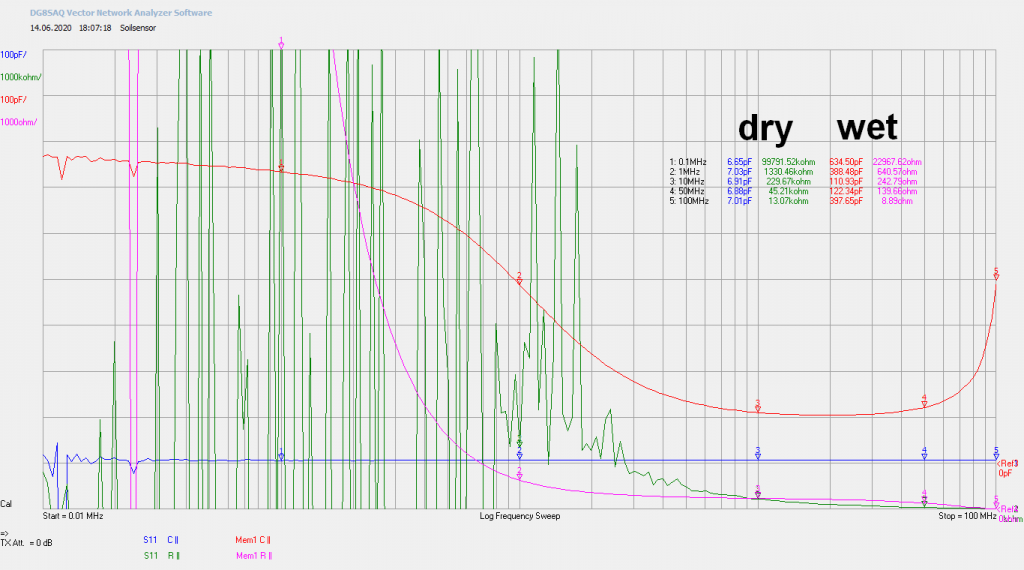
Das Gezappel der grünen Kurve bei kleinen Frequenzen kommt von den enorm hohen Werten des Parallelwiderstands (man beachte die Einheit von 1000 kOhm/div.!) bei trockenem Sensor; erst ab etwa 10 MHz (Marker 3) sind die Werte hier einigermaßen ernst zu nehmen.
Wie man sieht, ist die Kapazitätsänderung stark frequenzabhängig. Auf den ersten Blick scheint es wenig Sinn zu haben, den Sensor bei wesentlich höheren Frequenzen als 100 kHz zu betreiben, weil das Kapazitätsverhältnis von nass zu trocken zu höheren Frequenzen hin abnimmt und dieses Verhältnis bei 10 MHz fast 6x kleiner ist als bei 100 kHz.
Für die Verlustwiderstände beobachtet man eine noch viel größere Frequenzabhängigkeit, vor allem im Bereich unterhalb von 1 MHz.
Wie schaut es mit der Temperaturabhängigkeit aus?
Um das herauszukriegen, habe ich den Sensor in Eiswasser von etwa 1.3 °C getaucht und später in warmes Wasser

Das Ergebnis der Messung ein Eiswasser sieht man hier:
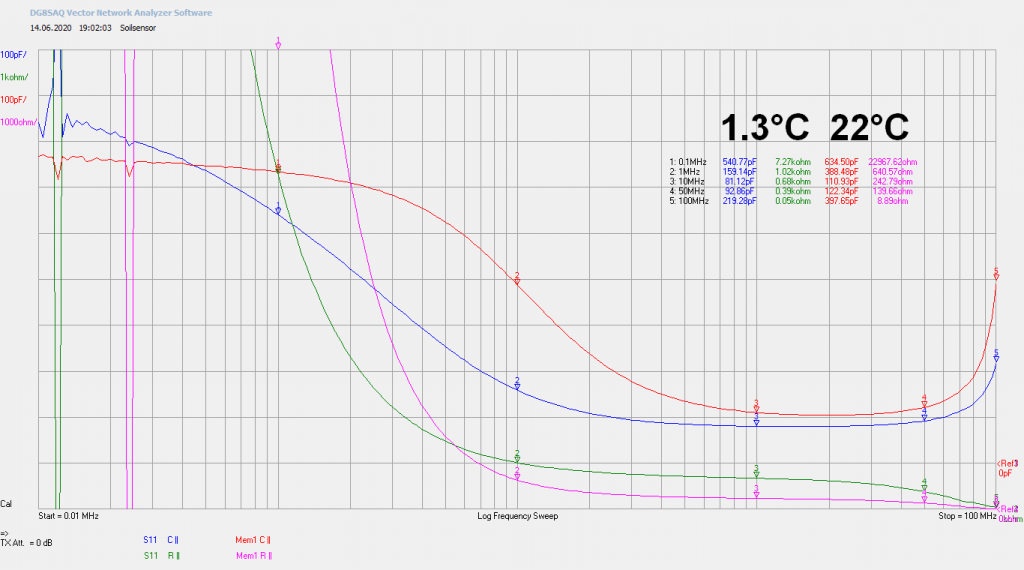
Die Kapazität zeigt eine deutliche Zunahme unterhalb von etwa 43 kHz und oberhalb dieser Frequenz eine deutlich Abnahme gegenüber den Werten bei 22°C. Der Parallelwiderstand nimmt unterhalb 540 kHz ab und darüber zu.
Hier ist das Ergebnis bei 40°C warmem Wasser:

Die Kapazität nimmt bei 40°C bei allen Frequenzen unterhalb von 20 MHz zu; ab etwa 20 MHz ändert sie sich nur noch wenig. Der Parallelwiderstand ist bei allen Frequenzen geringer als bei 22°C.
Wie sieht es oberhalb von 100 MHz aus?
Das ist zwar für die Realisierung eines möglichen Sensors vielleicht nicht mehr so wichtig, weil es bei so hohen Frequenzen mit dem Stromverbrauch bzw. Batteriebetrieb nicht mehr so gut ausschaut, aber neugierig war ich doch:

Etwas oberhalb von 100 MHz sieht man eine Resonanz, die sich in den vorigen Messungen am rechten Rand des Diagramm schon angedeutet hat.
Vielleicht ist es auch noch sinnvoll, den Salzgehalt zu variieren, weil man in feuchter Erde sicher eine andere Ionen-Konzentration vorfindet als in Leitungswasser!?