I was curious to find out how fast the interrupt response of a STM32H743 can be.
I connected a simple square wave generator to Pin PG3 of my old NUCLEOH743ZI-Board.
A PWM output of my raspberry Pi PICO was used as a square wave generator with a PWM frequency of 1234 Hz.
In addition, I connected a scope for watching the rising edge of this PWM signal to input channel 1 and PG2 to input channel 2
The Task
- Write a simple program that lets the STM32H743 react to a rising edge on PG3 (=EXTI3)
- The ISR should do nothing more than setting PG2 high as fast as possible and then again setting it back to low as fast as possible
I used STM32CUBEIDE v1.12.1 for this, setting the CPU clock speed to 400 MHz. Anything else was left at default values.
The results were astounding and disappointing:
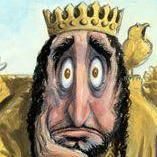
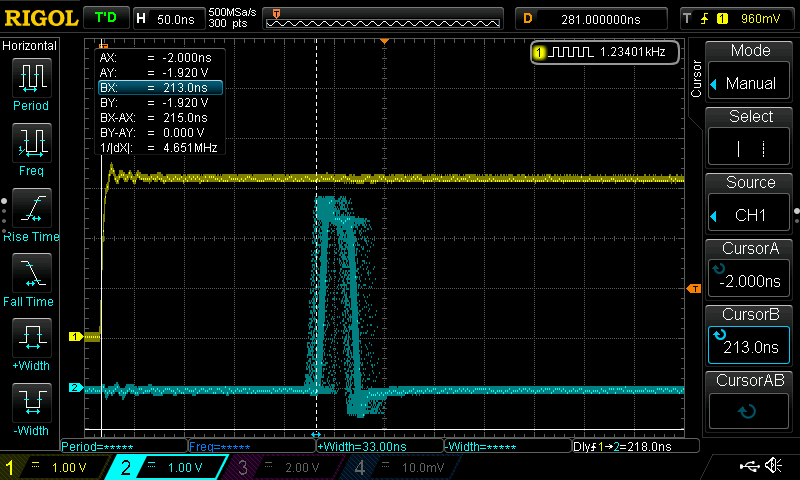
It took 380 ns between the rising edge of my interrupt generating signal and the rising edge of PG2.
And it took another 266 ns to the falling edge of PG2:
This is much slower than I expected!
Here is the code of the interrupt function, located in main.c:
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_2, GPIO_PIN_RESET);
}
/* USER CODE END 4 */
And this is what the compiler makes of it (.list-File):
08000640 <HAL_GPIO_EXTI_Callback>:
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
8000640: b580 push {r7, lr}
8000642: b082 sub sp, #8
8000644: af00 add r7, sp, #0
8000646: 4603 mov r3, r0
8000648: 80fb strh r3, [r7, #6]
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_2, GPIO_PIN_SET);
800064a: 2201 movs r2, #1
800064c: 2104 movs r1, #4
800064e: 4806 ldr r0, [pc, #24] ; (8000668 <HAL_GPIO_EXTI_Callback+0x28>)
8000650: f000 fc6e bl 8000f30 <HAL_GPIO_WritePin>
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_2, GPIO_PIN_RESET);
8000654: 2200 movs r2, #0
8000656: 2104 movs r1, #4
8000658: 4803 ldr r0, [pc, #12] ; (8000668 <HAL_GPIO_EXTI_Callback+0x28>)
800065a: f000 fc69 bl 8000f30 <HAL_GPIO_WritePin>
}
800065e: bf00 nop
8000660: 3708 adds r7, #8
8000662: 46bd mov sp, r7
8000664: bd80 pop {r7, pc}
8000666: bf00 nop
8000668: 58021800 .word 0x58021800
.
.
.
08000f30 <HAL_GPIO_WritePin>:
* @arg GPIO_PIN_RESET: to clear the port pin
* @arg GPIO_PIN_SET: to set the port pin
* @retval None
*/
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
{
8000f30: b480 push {r7}
8000f32: b083 sub sp, #12
8000f34: af00 add r7, sp, #0
8000f36: 6078 str r0, [r7, #4]
8000f38: 460b mov r3, r1
8000f3a: 807b strh r3, [r7, #2]
8000f3c: 4613 mov r3, r2
8000f3e: 707b strb r3, [r7, #1]
/* Check the parameters */
assert_param(IS_GPIO_PIN(GPIO_Pin));
assert_param(IS_GPIO_PIN_ACTION(PinState));
if (PinState != GPIO_PIN_RESET)
8000f40: 787b ldrb r3, [r7, #1]
8000f42: 2b00 cmp r3, #0
8000f44: d003 beq.n 8000f4e <HAL_GPIO_WritePin+0x1e>
{
GPIOx->BSRR = GPIO_Pin;
8000f46: 887a ldrh r2, [r7, #2]
8000f48: 687b ldr r3, [r7, #4]
8000f4a: 619a str r2, [r3, #24]
}
else
{
GPIOx->BSRR = (uint32_t)GPIO_Pin << GPIO_NUMBER;
}
}
8000f4c: e003 b.n 8000f56 <HAL_GPIO_WritePin+0x26>
GPIOx->BSRR = (uint32_t)GPIO_Pin << GPIO_NUMBER;
8000f4e: 887b ldrh r3, [r7, #2]
8000f50: 041a lsls r2, r3, #16
8000f52: 687b ldr r3, [r7, #4]
8000f54: 619a str r2, [r3, #24]
}
8000f56: bf00 nop
8000f58: 370c adds r7, #12
8000f5a: 46bd mov sp, r7
8000f5c: f85d 7b04 ldr.w r7, [sp], #4
8000f60: 4770 bx lr
.
.
.
In addition, the function HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) is not directly the interrupt handler, it is rather a function that is called by HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin):
08000f62 <HAL_GPIO_EXTI_IRQHandler>:
* @brief Handle EXTI interrupt request.
* @param GPIO_Pin: Specifies the port pin connected to corresponding EXTI line.
* @retval None
*/
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
8000f62: b580 push {r7, lr}
8000f64: b082 sub sp, #8
8000f66: af00 add r7, sp, #0
8000f68: 4603 mov r3, r0
8000f6a: 80fb strh r3, [r7, #6]
__HAL_GPIO_EXTID2_CLEAR_IT(GPIO_Pin);
HAL_GPIO_EXTI_Callback(GPIO_Pin);
}
#else
/* EXTI line interrupt detected */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != 0x00U)
8000f6c: f04f 43b0 mov.w r3, #1476395008 ; 0x58000000
8000f70: f8d3 2088 ldr.w r2, [r3, #136] ; 0x88
8000f74: 88fb ldrh r3, [r7, #6]
8000f76: 4013 ands r3, r2
8000f78: 2b00 cmp r3, #0
8000f7a: d008 beq.n 8000f8e <HAL_GPIO_EXTI_IRQHandler+0x2c>
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);
8000f7c: f04f 42b0 mov.w r2, #1476395008 ; 0x58000000
8000f80: 88fb ldrh r3, [r7, #6]
8000f82: f8c2 3088 str.w r3, [r2, #136] ; 0x88
HAL_GPIO_EXTI_Callback(GPIO_Pin);
8000f86: 88fb ldrh r3, [r7, #6]
8000f88: 4618 mov r0, r3
8000f8a: f7ff fb59 bl 8000640 <HAL_GPIO_EXTI_Callback>
}
#endif
}
8000f8e: bf00 nop
8000f90: 3708 adds r7, #8
8000f92: 46bd mov sp, r7
8000f94: bd80 pop {r7, pc}
...
And not even this one is the actual interrupt handler! The actual interrupt handler function is this one:
08000700 <EXTI3_IRQHandler>:
/**
* @brief This function handles EXTI line3 interrupt.
*/
void EXTI3_IRQHandler(void)
{
8000700: b580 push {r7, lr}
8000702: af00 add r7, sp, #0
/* USER CODE BEGIN EXTI3_IRQn 0 */
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
8000704: 2008 movs r0, #8
8000706: f000 fc2c bl 8000f62 <HAL_GPIO_EXTI_IRQHandler>
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
800070a: bf00 nop
800070c: bd80 pop {r7, pc}
...
Improvement #1: using bit-set-and-reset-registers BSRR for setting the GPIO output values
Yes, I know, this will hardly change the interrupt latency, but the 248 ns pulse width annoyed me the most.
Here is what I changed:
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
GPIOG->BSRR = (1 << 2);
GPIOG->BSRR = (1 << 2) << 16;
}
/* USER CODE END 4 */
This compiles to:
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
8000640: b480 push {r7}
8000642: b083 sub sp, #12
8000644: af00 add r7, sp, #0
8000646: 4603 mov r3, r0
8000648: 80fb strh r3, [r7, #6]
GPIOG->BSRR = (1 << 2);
800064a: 4b06 ldr r3, [pc, #24] ; (8000664 <HAL_GPIO_EXTI_Callback+0x24>)
800064c: 2204 movs r2, #4
800064e: 619a str r2, [r3, #24]
GPIOG->BSRR = (1 << 2) << 16;
8000650: 4b04 ldr r3, [pc, #16] ; (8000664 <HAL_GPIO_EXTI_Callback+0x24>)
8000652: f44f 2280 mov.w r2, #262144 ; 0x40000
8000656: 619a str r2, [r3, #24]
}
8000658: bf00 nop
800065a: 370c adds r7, #12
800065c: 46bd mov sp, r7
800065e: f85d 7b04 ldr.w r7, [sp], #4
8000662: 4770 bx lr
8000664: 58021800 .word 0x58021800
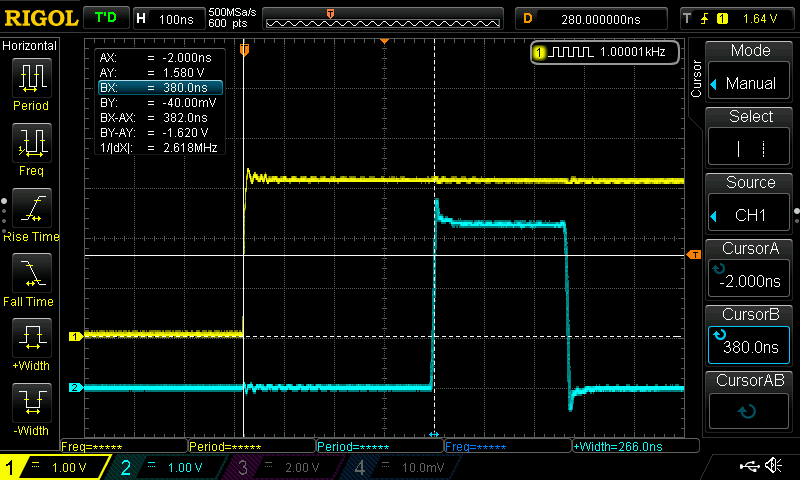
That looks much better!
The time between the rising edge of the interrupt signal PG3 and the rising edge of PG2 has improved only slightly (I measured a very jittery value of 374/384 ns), but the ON-time of PG2 has improved significantly: I measured 42 ns:
By the way:
Why not using Bit-banding?
Because the M7 family does not support this!
https://community.arm.com/support-forums/f/architectures-and-processors-forum/10266/why-cortex-m7-doesn-t-support-bit-banding
Improvement #2: putting the code directly into the ISR
This requires editing the file „stm32h7xx_it.c“:
void EXTI3_IRQHandler(void)
{
/* USER CODE BEGIN EXTI3_IRQn 0 */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_3) != 0x00U)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3);
GPIOG->BSRR = (1 << 2);
GPIOG->BSRR = (1 << 2) << 16;
}
return;
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
This compiles to:
080006d4 <EXTI3_IRQHandler>:
/**
* @brief This function handles EXTI line3 interrupt.
*/
void EXTI3_IRQHandler(void)
{
80006d4: b480 push {r7}
80006d6: af00 add r7, sp, #0
/* USER CODE BEGIN EXTI3_IRQn 0 */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_3) != 0x00U)
80006d8: f04f 43b0 mov.w r3, #1476395008 ; 0x58000000
80006dc: f8d3 3088 ldr.w r3, [r3, #136] ; 0x88
80006e0: f003 0308 and.w r3, r3, #8
80006e4: 2b00 cmp r3, #0
80006e6: d00b beq.n 8000700 <EXTI3_IRQHandler+0x2c>
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3);
80006e8: f04f 43b0 mov.w r3, #1476395008 ; 0x58000000
80006ec: 2208 movs r2, #8
80006ee: f8c3 2088 str.w r2, [r3, #136] ; 0x88
GPIOG->BSRR = (1 << 2);
80006f2: 4b06 ldr r3, [pc, #24] ; (800070c <EXTI3_IRQHandler+0x38>)
80006f4: 2204 movs r2, #4
80006f6: 619a str r2, [r3, #24]
GPIOG->BSRR = (1 << 2) << 16;
80006f8: 4b04 ldr r3, [pc, #16] ; (800070c <EXTI3_IRQHandler+0x38>)
80006fa: f44f 2280 mov.w r2, #262144 ; 0x40000
80006fe: 619a str r2, [r3, #24]
}
return;
8000700: bf00 nop
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
8000702: 46bd mov sp, r7
8000704: f85d 7b04 ldr.w r7, [sp], #4
8000708: 4770 bx lr
800070a: bf00 nop
800070c: 58021800 .word 0x58021800
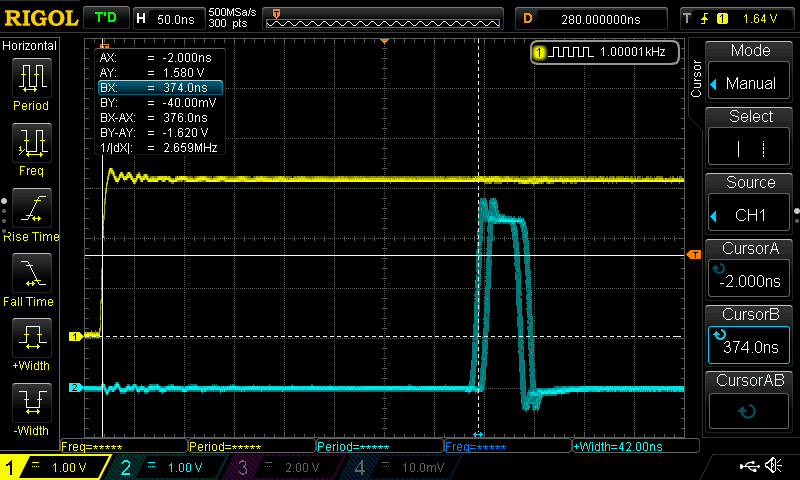
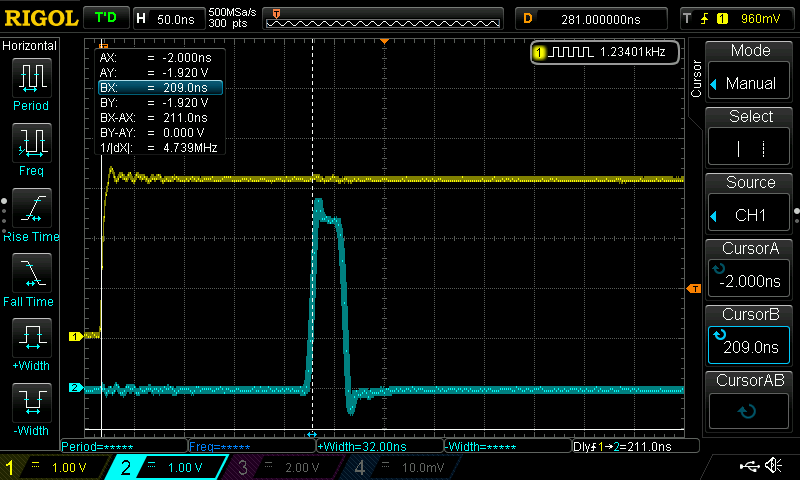
The time between the rising edge of the stimulus signal and rising edge has changed significantly: It varies now between 261 ns and 314 ns:
Improvement #3: Removing check of pending IT and lowering priority of other interrupts
EXTI3 is not a combined interrupt like EXTI(10…15). EXTI3 has its own interrupt vector, so it should be unneccessary to check EXTI_CPUPR1.
The interrupt priorities should be changed so that no other interrupt, at least during normal operation, interrupts the interrupt service routine for EXTI3.
The interrupt priorities were changed via CubeMX:
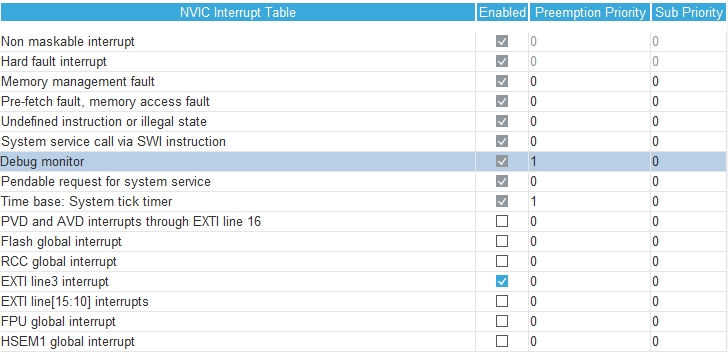
and here is the code of the ISR:
/**
* @brief This function handles EXTI line3 interrupt.
*/
void EXTI3_IRQHandler(void)
{
/* USER CODE BEGIN EXTI3_IRQn 0 */
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3);
GPIOG->BSRR = (1 << 2);
GPIOG->BSRR = (1 << 2) << 16;
return;
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
The code above compiles to:
080006dc <EXTI3_IRQHandler>:
/**
* @brief This function handles EXTI line3 interrupt.
*/
void EXTI3_IRQHandler(void)
{
80006dc: b480 push {r7}
80006de: af00 add r7, sp, #0
/* USER CODE BEGIN EXTI3_IRQn 0 */
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3);
80006e0: f04f 43b0 mov.w r3, #1476395008 ; 0x58000000
80006e4: 2208 movs r2, #8
80006e6: f8c3 2088 str.w r2, [r3, #136] ; 0x88
GPIOG->BSRR = (1 << 2);
80006ea: 4b06 ldr r3, [pc, #24] ; (8000704 <EXTI3_IRQHandler+0x28>)
80006ec: 2204 movs r2, #4
80006ee: 619a str r2, [r3, #24]
GPIOG->BSRR = (1 << 2) << 16;
80006f0: 4b04 ldr r3, [pc, #16] ; (8000704 <EXTI3_IRQHandler+0x28>)
80006f2: f44f 2280 mov.w r2, #262144 ; 0x40000
80006f6: 619a str r2, [r3, #24]
return;
80006f8: bf00 nop
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
80006fa: 46bd mov sp, r7
80006fc: f85d 7b04 ldr.w r7, [sp], #4
8000700: 4770 bx lr
8000702: bf00 nop
8000704: 58021800 .word 0x58021800
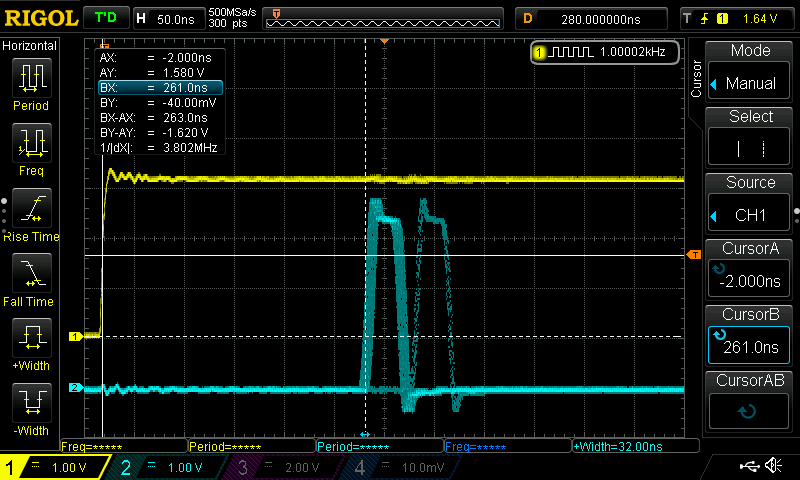
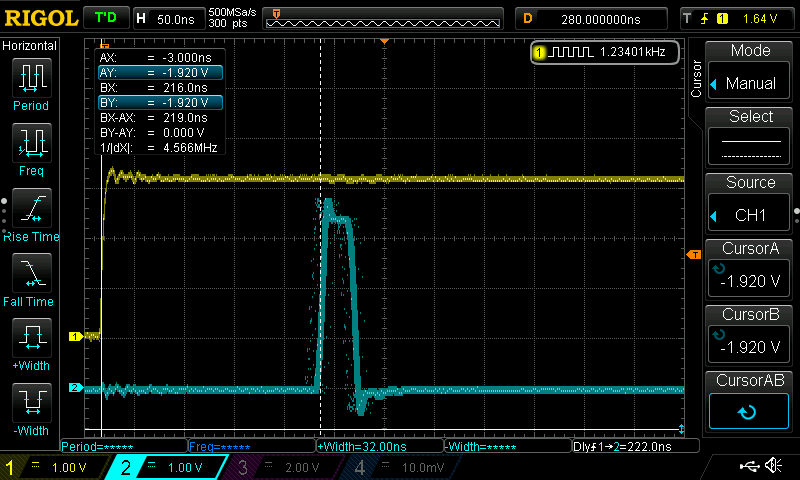
And this is the corresponding scope display:
What else can be done for improving the response?
„Improvement #4“: Clearing the Interrupt Bit later in the code
This was no improvement at all!
My idea was to call __HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3); after the output pulse on PG2.
And I decided to set and reset PG2 by using a few lines of assemly code, because I realized that the GCC compiler loads R3 twice with the same address without changing R3 in between, see code above.
This was the code:
/**
* @brief This function handles EXTI line3 interrupt.
*/
void EXTI3_IRQHandler(void)
{
/* USER CODE BEGIN EXTI3_IRQn 0 */
__asm volatile ("ldr r3, =0x58021800");
__asm volatile ("mov r2, #0x4");
__asm volatile ("str r2, [r3, #24]");
__asm volatile ("mov r2, #0x40000");
__asm volatile ("str r2, [r3, #24]");
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3);
return;
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
and here you can see what has happened:
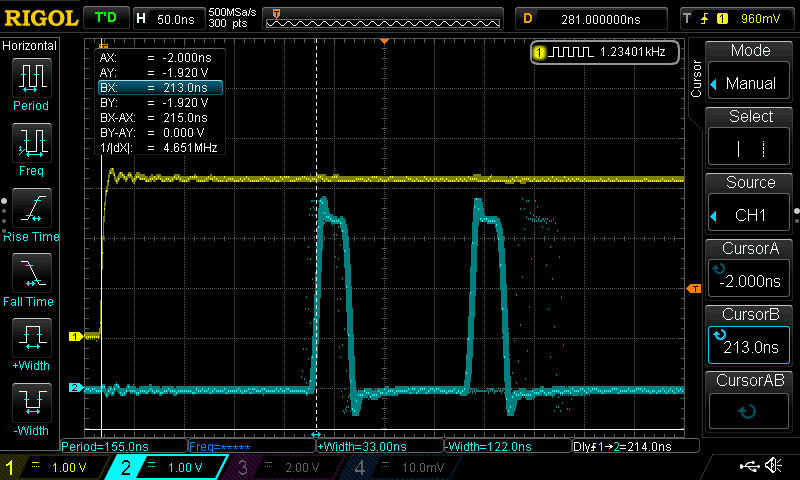
There are 2 output pulses!
How can this be?
It looks like clearing the interrupt bit in the interrupt pending register EXTI_CPUPR1 takes a long time and when the interrupt service routine has ended, the interrupt bit is still active and triggers another interrupt!
Meanwhile the pending bit has been cleared, so that after the second interrupt no more further interrupts are generated.
Is it possible to program some delay before the return statement in the ISR?
Yes, it is, but it takes a lot of NOP()s!
Look here:
/**
* @brief This function handles EXTI line3 interrupt.
*/
void EXTI3_IRQHandler(void)
{
/* USER CODE BEGIN EXTI3_IRQn 0 */
__asm volatile ("ldr r3, =0x58021800");
__asm volatile ("mov r2, #0x4");
__asm volatile ("str r2, [r3, #24]");
__asm volatile ("mov r2, #0x40000");
__asm volatile ("str r2, [r3, #24]");
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3);
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
return;
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
It requires inserting 18 NOP()s until the double pulses vanish:
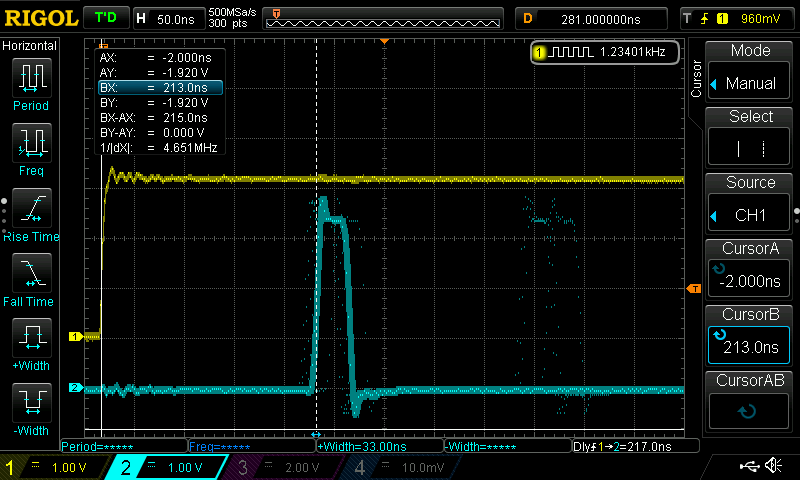
But it still seems like they do not vanish completely…
This is a really strange behavior!
I decided to restore the order of execution:
void EXTI3_IRQHandler(void)
{
/* USER CODE BEGIN EXTI3_IRQn 0 */
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_3);
__asm volatile ("ldr r3, =0x58021800");
__asm volatile ("mov r2, #0x4");
__asm volatile ("str r2, [r3, #24]");
__asm volatile ("mov r2, #0x40000");
__asm volatile ("str r2, [r3, #24]");
return;
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
This seems to remove double pulses completely. The following screen shot was made after running the scope for several minutes in infinite persistance display mode:
Improvement #5: Using tightly coupled memories ITCM and DTCM
In order to use ITCM and DTCM memories, which run without any wait states even at 400 MHz, I made a copy of the linker script file STM32H743ZITX_RAM.ld and called it STM32H743ZITX_TCM.ld .
I then searched through the file and replaced every occurence of >RAM_EXEC by >ITCMRAM.
Then I changed the project settings in STM32CubeIDE via
Project -> Properties -> C/C++ Build -> Settings -> MCU GCC Linker -> General -> Linker Script from STM32H743ZITX_FLASH.ld to STM32H743ZITX_TCM.ld
Then I cleaned the project and built it again.
This it what comes out:
Result:
The shortest interrupt response time that I could observe between an externally applied interrupt signal and a GPIO output signal is about 210 ns.
What does that mean?
If I take into account an interrupt latency of 12 to 14 clock cycles of an ARM CORTEX-M7 core (see chapter 5.2 of this white paper) and another 8-16 clock cycles for clearing the pending ISR flag and setting the GPIO output, considering that accessing a peripheral address is way slower than accessing the ITCM, then everything sums up to about 30 clock cycles.
But my oscilloscope says that it takes 210 ns until something happens, which is 210 ns * 400 MHz = 84 clock cycles.
So where are the missing 54 clock cycles?
Are they all consumed by the EXTI?
I think so, I have no better explanation…
i am having exactly the same problem. stm32h725, 400 MHz sysclk, EXTI4 on PE4 interrupts. for testing the handler only clears the interrupt and toggles PE12.
i am coding in bare assembly, not using HAL at all. during init, i copy all code to ITCM at 0x00000000, including stripping the flash offsets from the vector table, then shift PC tomove execution to sram only. i set VTOR to 0 to map the system lookup of the vector table to the ITCM block. i am not using FPU and have explicitly turned off the bits for including FPU registers in the context frame.
i can see incremental improvements from each of the steps, both in reduced latency and reduced jitter, but the best i can do is 168 ns. this makes no sense to me at all. it should be 30 ns for stacking the frame, and 25 ns more to execute the handler code up to the GPIOBSRR line to change the output. since the gpio bus is 2x slower clocking, allow another 10ns max for those lines. there is over 100 ns stall somewhere that i can’t find.
did you learn anything more?
The absolute best GPIO input-to-output IRQ latency I was able to achieve was 70 ns on the STM32H743 (SYSCLK = 480 MHz from PLL1, Revision V). The test code was written in C, HAL was used by without calling high-level HAL functions in the handler, and with both the vector table and the IRQ handler running in ITCM. If the vector table was not properly relocated by reprogramming VTOR, the latency is increased to 100 ns. Busy-polling the EXTI event via _WFE() instead of an IRQ reduced it further to 60 ns.
I also found a GPIO pulse can’t be shorter than 25 ns, which means software-controlled GPIO toggling is limited to a 20 MHz square wave. So far I’m not able to overcome this limitation.
If the external pulse is periodic, such as a clock, I found it’s possible to hide the IRQ latency for all but the first pulse by triggering an internal timer and wait for the timer IRQ instead. The timer is programmed to fire slightly before next edge of the real pulse arrives. For example, if the pulse has a period of 1000 ns and the IRQ latency is 100 ns, you can use the GPIO pulse to trigger a timer to count for 900 ns (100 ns earlier), effectively predicting the next pulse and eliminating the IRQ latency for all subsequent IRQs.
Hi,
Toggling a simple pin on the H7 is very slow as I remember it.
Try doing a simple endless loop, with all interrupts disabled, that just set and then clear an IO pin.
With a STM32F4 it’s extremely fast, with a H7 not so much. Could be part of the explanation.
Best regards
After extreme optimizations, I was able to achieve a polling latency of 38 ns, and an IRQ latency of 45 ns. But these techniques are not practical since the system bus and the GPIO controller are completely bypassed. For a practical application, the best number is around 60 – 70 ns.
Code is available on Codeberg: https://codeberg.org/niconiconi/stm32h7-exti-latency